

Photovoltaic cleaning robot:
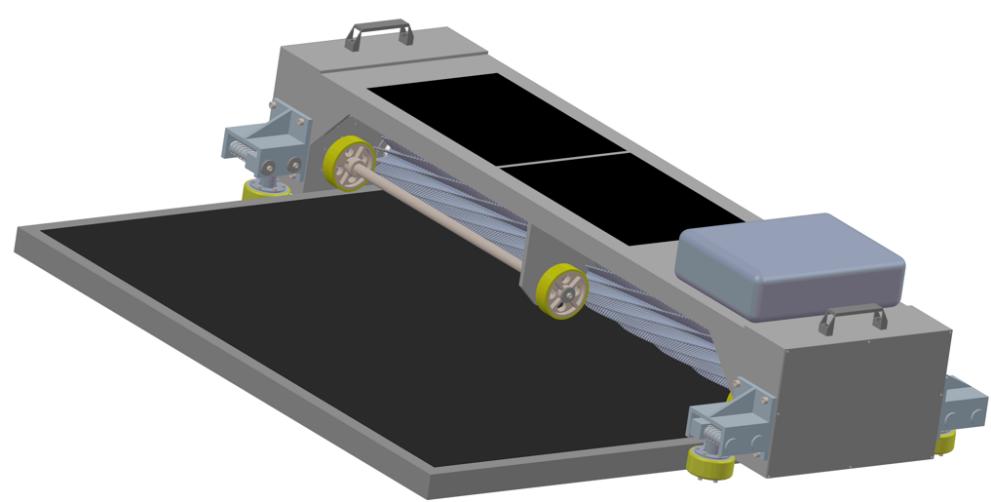
The photovoltaic cleaning robot is designed to meet the following four requirements due to the complex geographical environment of photovoltaic power stations and the significant differences in the installation methods of photovoltaic panels: First, the walking performance must enable stable movement on an inclined plane within a certain angle to avoid spinning or falling, ensuring the safety and reliability of the cleaning operation; Second, the cleaning performance should achieve water-free cleaning, simplify the structure and transmission method of the cleaning device to cover the entire axis cleaning, allowing dust to slide off, and the cleaning brush needs to be soft and resilient to prevent damage to the photovoltaic panels; Third, the through-ability must adapt to the slope and height differences between panels caused by terrain and foundation settlement, ensuring smooth operation on the surface of the photovoltaic panels; Fourth, self-energy supply, avoiding the dragging force and swaying problems caused by power supply through cables, improving the stability and continuity of the operation. The through-ability and cleaning ability of this robot have been tested experimentally. The experimental results show that the robot's maximum cleaning efficiency can reach 97.93%, the maximum obstacle clearance height is 15mm, and the maximum climbing angle is 15°. During operation, the robot did not experience any stalling or stagnation, the walking posture was stable, and it could efficiently clean the dust on the surface of the photovoltaic panels.


